
Nella _ guanto robotico riabilitativo
Progetto di tesi magistrale di Michela gerbotto // Relatore Enrico Bassi
Il progetto Nella è nato dalla volontà di rendere accessibile un prodotto costoso e di difficile reperibilità per mitigare gli effetti dell’empilegia. Il danno causato da questa patologia è cerebrale, e provoca un danno controlaterale, ossia opposto al danno che fa al cervello, che si traduce in una semi-paralisi di metà del corpo. Per evitare di arrivare ad una paralisi totale degli arti, la persona colpita da questa patologia deve sottoporsi a riabilitazione. Questa varia a seconda delle capacità, motivazionali e muscolari, del paziente. Questo intervento progettuale si concentra sulla mano. L’obiettivo della riabilitazione è riuscire gradualmente a far estendere la mano limitando la possibilità che questa si richiuda a pugno.
Per facilitare i processi riabilitativi si è pensato ad un guanto robotico facile da realizzare e da utilizzare. Per la parte hardware sono stati adottati Arduino e due servomotori necessari alla generazione del movimento.


Arduino permette di rendere facilmente scalabile il progetto, grazie alla sua ampia diffusione e popolarità. Chi volesse, potrebbe inserire il codice che troverà nelle istruzioni e potrà modificare i parametri per personalizzare l’esercizio.
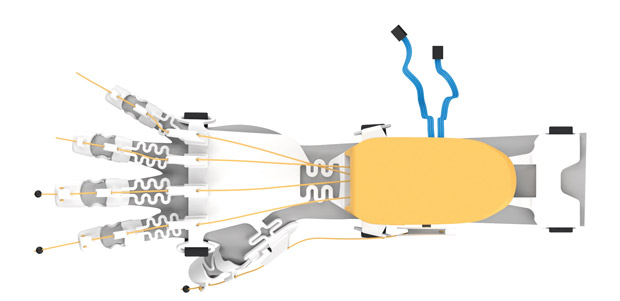
Per offrire facilità d’uso e assemblaggio, il guanto è stato pensato in un pezzo unico. Sulla struttura andranno posizionati solamente la scheda Arduino, i motorini e i cavi di tensionamento. La stampa della struttura è ottenibile con la sinterizzazione laser SLS, questa tecnica permette di creare forme articolate mantenendo un buon grado di qualità. Per quanto riguarda il materiale è stato scelto il TPU, un materiale adatto ai prodotti medicali e molto resistente.

